
Что такое шаговый двигатель, зачем он нужен и как работает
Что такое шаговый двигатель, зачем он нужен и как работает
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
- возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо.
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель — дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт.
Что такое шаговый двигатель, зачем он нужен и как работает
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
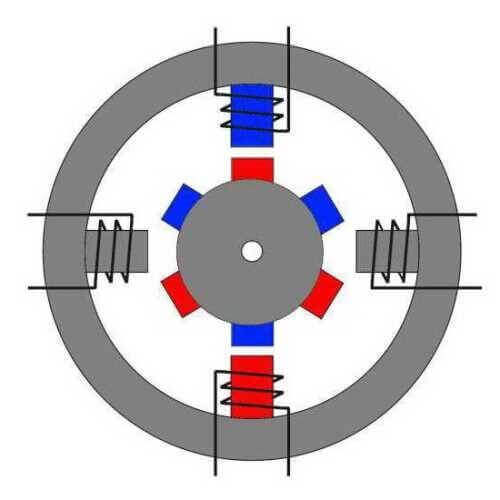
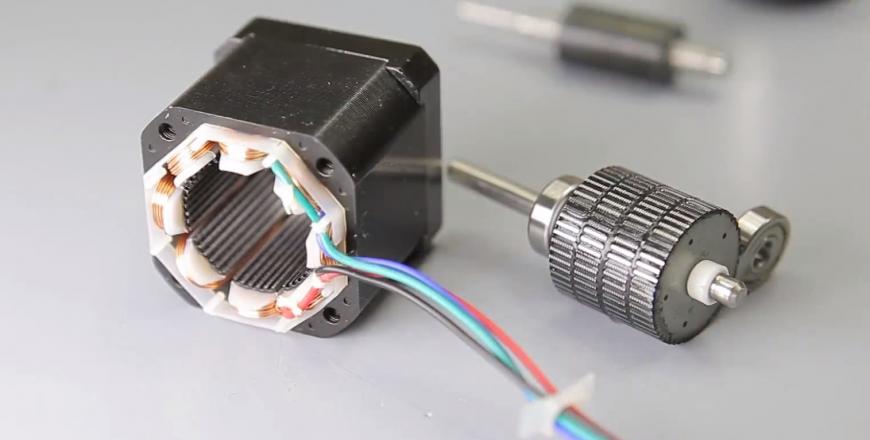
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
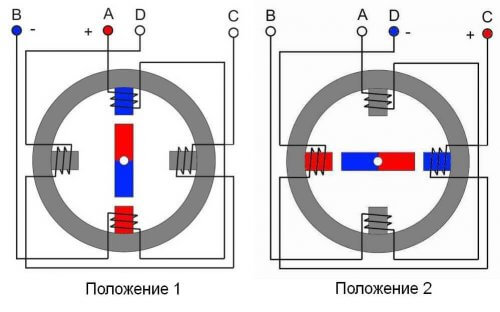
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
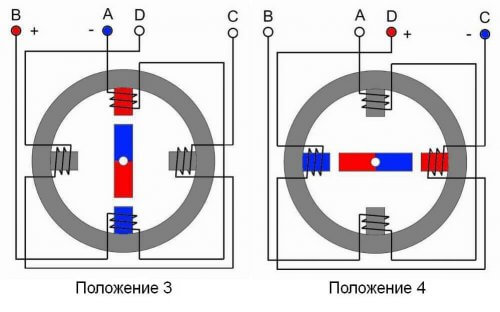
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
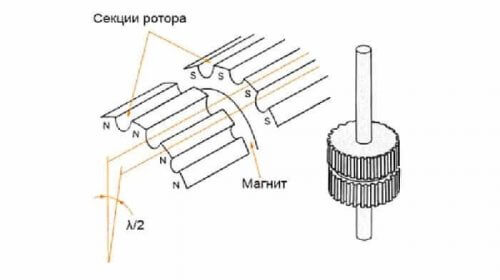
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Шаговый двигатель
- Типы шаговых двигателей
- Реактивный шаговый двигатель
- Шаговый двигатель с постоянными магнитами
- Гибридный шаговый двигатель
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Типы шаговых двигателей
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
Реактивный шаговый двигатель
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.


Ниже представлены осциллограммы управления для трехфазного шагового двигателя.



Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
 ,
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.

Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.


Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.

Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.

На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.

На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Шаговый двигатель
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S. Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
- Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции. Величина сопротивления между корпусом и обмотками;
- момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
О шаговых двигателях и том, как их есть
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.
Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.
Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.
Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.
И тут можно задаться вопросом, — ‘а как же напряжение?’. Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. Последние — экзотика в наших краях (ну я по крайней мере вообще их в руках не держал). А вот те, что с 6-тью проводами — те встречаются. Если просто, то это тоже самое, что и с 4-мя, но на обеих обмотках есть центральный отвод. Более наглядно можно посмотреть на иллюстрации, которую я честно где-то стырил.

Но я так и не сказал, что брать? Если есть 4-выводной, берём его, если нет, не расстраиваемся и берём 6-выводной. Но лучше берите 4-выводной (мороки меньше). Кстати, на картинке 8-выводной двигатель показан в режиме, когда у него пары обмоток подключены параллельно.
О чём ещё не сказал? О размерах? Ну разве ими кого-то удивишь? Наш типоразмер это Nema17, тут ничего нового. Можно и другие, но это уже снова экзотика.
Ну и последнее. Вот я купил двигатель, а дальше что? Как на нём правильно настроит ток? А всё очень просто, я уже поверхностно описывал этот процесс в одном из своих постов. Нам понадобится мультиметр, отвёртка и немного математики. Настройка тока производится методом кручения подсроечника на драйвере и снятия контрольного напряжения. Напряжение можно снимать — как на картинке.
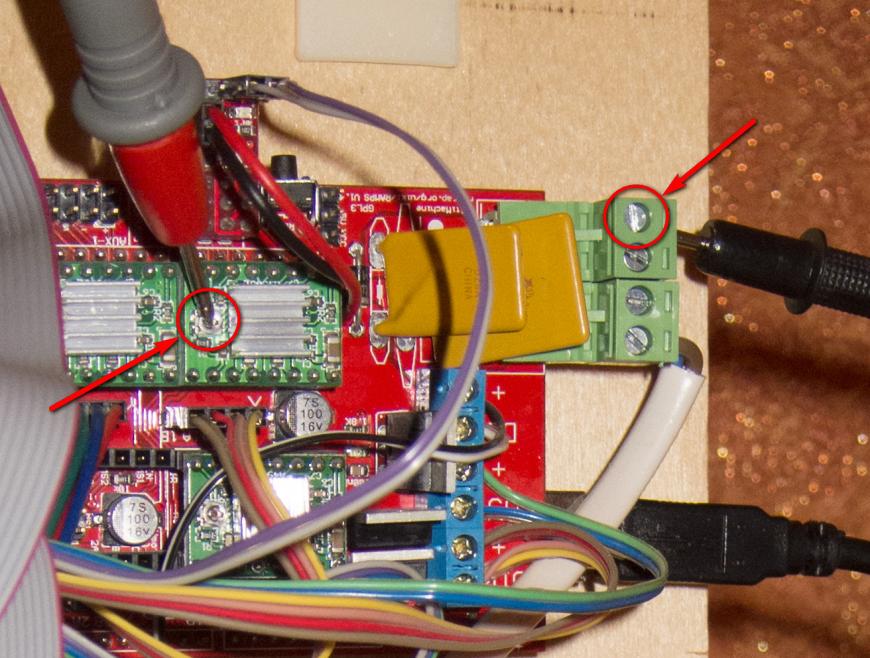
А дальше считаем по формуле, какое контрольное напряжение (Vr) нам надо выставить. Формула различается для разных драйверов.
Vr = Номинальный ток / 2,5
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 .5 = 0.68V
Vr = Номинальный ток / 2
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 = 0,85V